黒岩神奈川県知事をはじめ、関係者、メディア、一般市民など、約80名が公開デモを見学した。
 
挨拶 神奈川県知事 黒岩祐治氏
<公開デモ>
「さがみロボット産業特区」では、介護・医療、高齢者支援、災害対応の3つの分野の生活支援ロボットの実証実験を平成25年10月から平成26年2月に実施した。
(1)介護・医療
|
盲導犬ロボット 日本精工(株) |
視覚障がい者が病院などの施設内で自由に移動するための支援機器。
操作者がロボットの後ろに立ち、グリップに触れて行きたい方向に軽く力を加えるとその方向にロボットが動き出す。進路上に障害物がある際には、障害物センサが反応して操作者からの指令を修正し、回避または停止する。また、あらかじめ記憶しておいた地図情報と車輪回転量、周囲の壁形状とからロボットは自分の位置を把握する。操作者がボタンによって目的地を設定すると目的地(経由地)に到達するために進むべき方向をロボットが音声で発し、その音声案内に従ってグリップを操作してロボットを動かすことで目的地にたどり着くことができる。
 
実証実験では、被験者が白杖とロボットについて対象施設の同一フロア内の目標地点への到達の特性に関する自己対照試験を行った。
|
自律運転車椅子 よこはまティーエルオー(株) |
電動車椅子による事故の低減及び、運動に障害を持つ利用者のQOLの向上を目的とした自律運転可能な車椅子ロボット。
スキャナ式レーザ測距センサを1台搭載し、取得データのマッチングを行う高速なアルゴリズムにより、実時間で高精度な環境地図自動生成および自己位置推定を実現している。
 
実証実験では、自律運転車椅子ロボットによる環境地図の自動生成、自己位置推定及び、自律運転制御の機能について、フィールドにおける走行試験を行った。
|
パワーアシストハンド LLPアトムプロジェクト |
空気の力を利用して伸縮するベローズ(蛇腹)により手指のリハビリを支援するロボット。
 
実証実験では、機能・フィッティングについて検証し、より洗練されたデザインの追求など、完成度の高い製品を作り上げることを目的に装着前・装着準備にあたっての評価、ロボットの使用時・使用中・使用後の評価試験を行った。
|
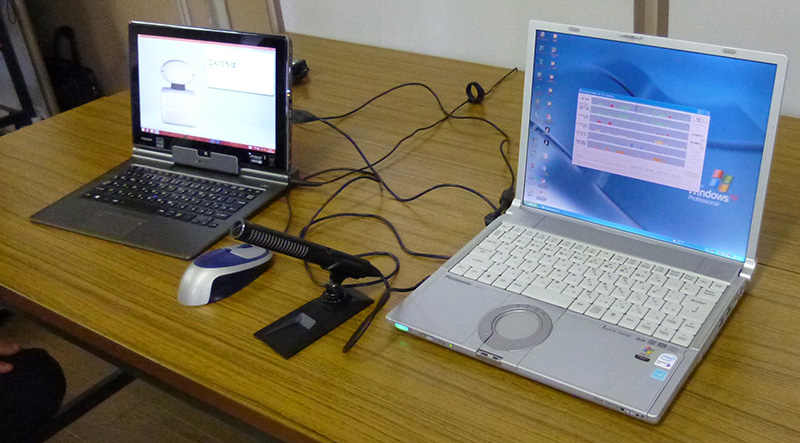
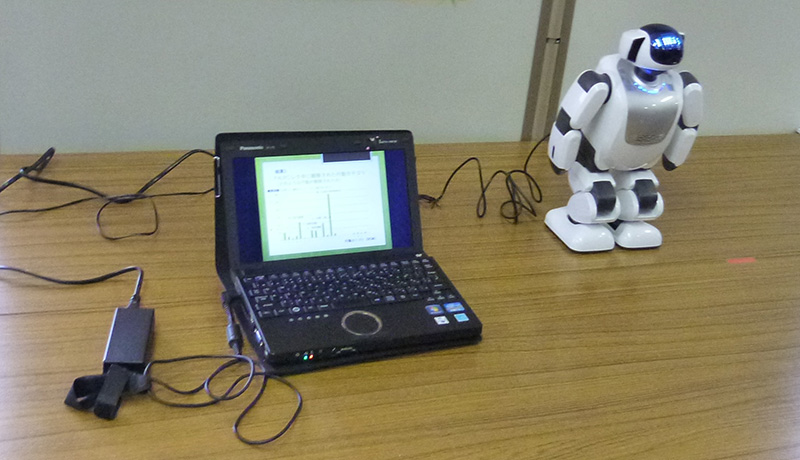
心の健康計測システム PST(株) |
人の音声から心の健康度を測定するソフトウェア。
心の健康に不安を持つ人々や精神科医、心理療法士に補助ツールとして、心の健康度の定量化を目指している。
 
実証実験では、高性能録音機で取得した話者音声データをPCにインストールした心の活量計ソフトウェア(プロトタイプ)で解析し、心の健康度を数値データとして出力。同一被験者から音声取得を行い、メランコリー変移(=憂鬱度)を計測する実験を行った。
|
遠隔操作による超音波診断ロボット 早稲田大学 |
遠隔操作・自動走査プログラムにより、胎児の健康チェック及び、身体測定を行うロボット。
回転・煽り・並進2軸・押し付けの計5自由度関節を有しているため、子宮上部全体を走査できる。さらに、妊婦の背部に背板を設置し、ワンタッチで上下動できる支柱で背板とロボット本体を接続する構造を取り入れ、エコー映像の取得に要する接触力以外の荷重が腹部にかからないため、妊婦の身体への負担を大幅に低減できる。
 
実証実験では、実際の妊婦ではなく、人体を精巧に模擬した胎児ファントムを用い、ロボットを装着して評価を行った。具体的には、産婦人科医がいる病院Aとエコーロボットを装着した胎児ファントムを設置する施設Bとの間を通信で接続した上で、映像・音声・ロボットへのコマンドを双方でやりとりしながら、遠隔健診を行える可能性を検証した。
|
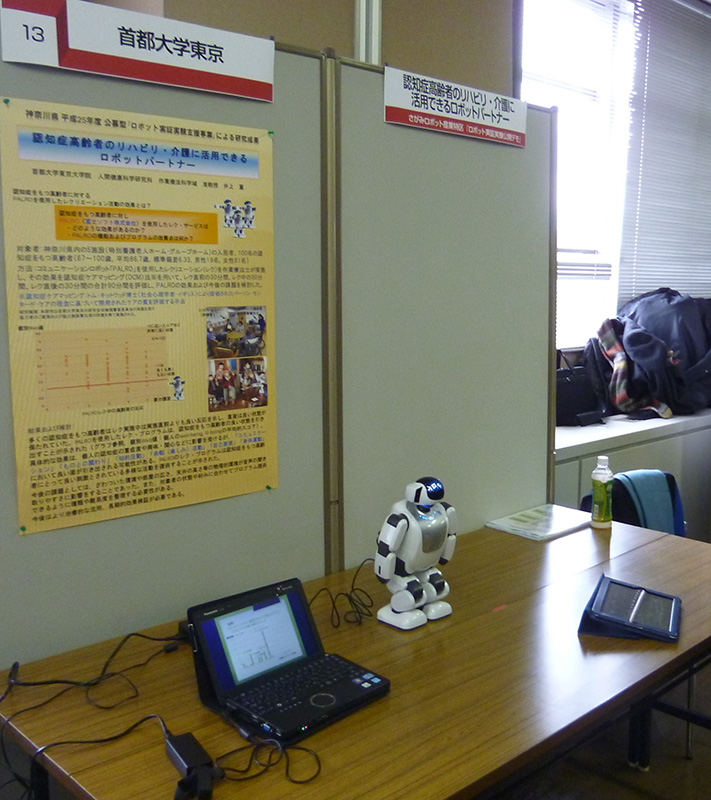
認知症高齢者のリハビリ・介護に活用できるロボットパートナー 首都大学東京 |
ロボットパートナーは、コミュニケーション知能を活かして、カメラで人の顔を認識、マイクで音声認識による会話を行うことができる。さらに、ネットワーク環境を通して、インターネットなどに繋ぐことで様々な情報コンテンツを提供することができる。
 
実証実験では、高齢者の健康づくりを支援するための方法論として、ロボットパートナーを活用することの有効性を検証するとともに、3次元測域センサを用いた動作計測により、健康づくりの効果や成果を定量的に評価するための方法論を検証した。具体的には、ロボットパートナーを用いた体操の試験、高齢者の運動能力変化の評価、高齢者の行動パターン及びロボットパートナーに対する印象の調査などを行った。
(2)高齢者支援
|
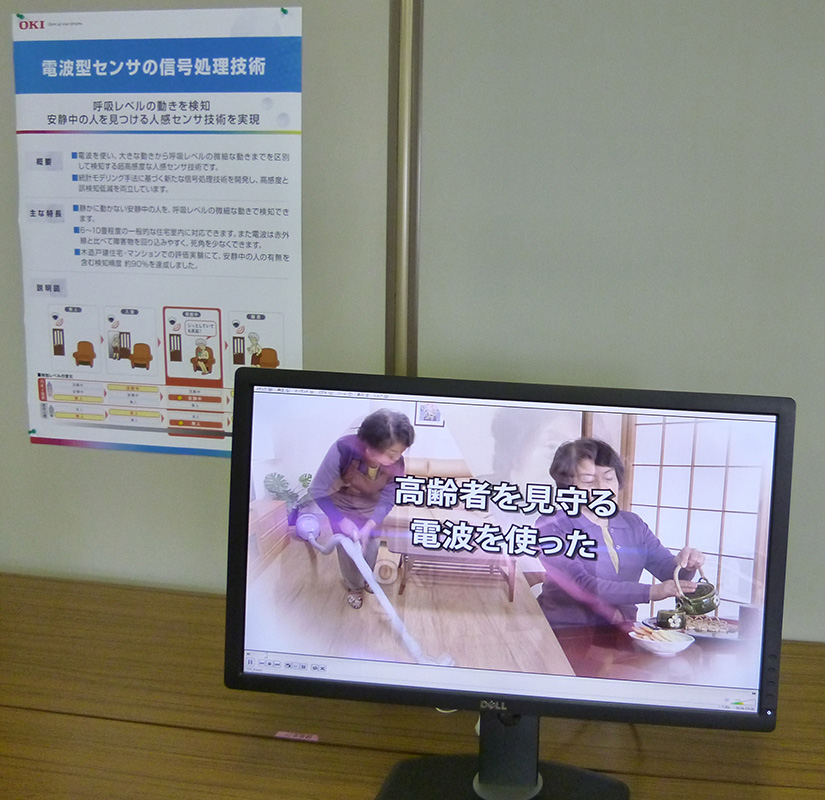
高齢者見守りシステム 沖電気工業(株) |
電波型のドップラーセンサに独自開発の人感センサに特化した認識部を搭載し、従来の赤外人感センサでは検知困難であった安静状態の人の検知ができるシステム。
 
実証実験では、高齢者が生活する居室内に電波型人感センサを設置し、日常生活および就寝中の検知データを収集。電波型人感センサの製品化および検知精度の検証を行った。
|
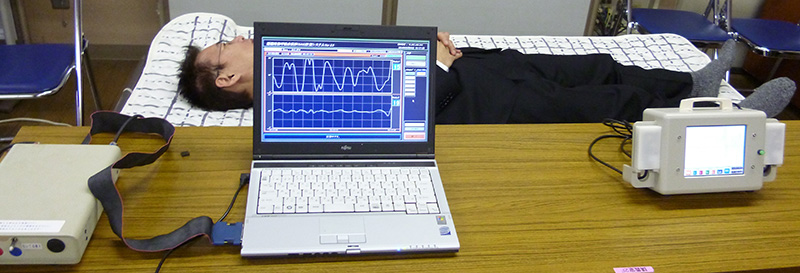
高齢者見守りシステム「レーダーライト」 (株)CQ-Sネット |
「レーダーライト」は、電波を放射してその反射により距離を計測するシステム。
マイクロ波により身体各部の動きや呼吸による体表変位が可能で、特にベッドに寝ている状態では、安定した距離で強い反射帯を計測することが出来る。「レーダーライト」は、連続動作を計測することができるので、ベッドから起き上がった場合、レーダーとの距離が変化し、ベッドから足を出すと足の甲からの反射波が寝ていた距離とは異なった距離に反射波が計測されるため、床に足をつけた事を検出できる。また、ベッド上で立ち上がったり等の危険動作も検知可能。特に足を床につけた段階では、「暫くお待ち下さい。看護師が来ますのでそのままお待ち下さい」などのメッセージ音を流したり、近くにいる看護師の携帯電話(PHS)、スマートホン端末などへ連絡を入れ、駆けつける事も可能。
 
実証実験では、「レーダーライト」の性能評価及びレーダー技術を活用する事で離床の把握が可能である事の検証を行った。
|
高齢者の体力の維持・向上に活用できる対話ロボット 首都大学東京 |
ロボットによるリハビリ・介護活動が認知症高齢者に及ぼす影響及び効果を実証するためにパートナーロボットを使用。
 
実証実験では、ディメンティア・ケア・マッピング(Dimentia Care Mapping:DCM)法を用いて、認知症の高齢者に対する約30分のレクリエーションによる効果試験と、ロボットパートナーに対する高齢者の行動変化を観察した。
|
コミュニケーションパートナーロボット(PALRO) 富士ソフト(株) |
4つの基本機能(コミュニケーション機能(会話機能)、移動機能、学習機能、ネットワーク通信機能)や、多彩なアプリケーションを搭載しているロボット。
実証実験では、生活支援や介護予防等の機能と認知症の高齢者にも対応可能な機能を追加したPALROを活用し、高齢者施設で試行検証を実施し、最適な運用について介護現場からの情報収集を行った。
 
具体的には、PALROの施設内レクリエーション、施設受付、施設利用高齢者との運用試験、レクリエーションコンテンツ及びスケジュール告知による行動促進、施設職員の負担感、新規コンテンツ案の調査を行った。
(3)災害対応
|
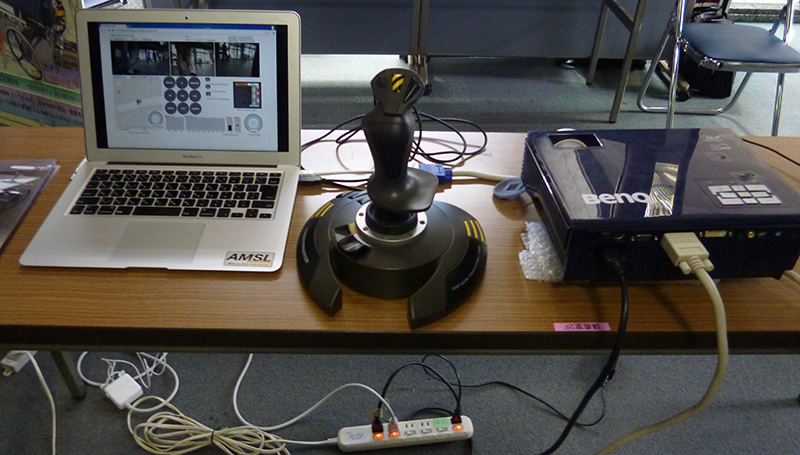
災害状況遠隔調査車両 三菱重工業(株) |
クランク車輪※を装着した災害状況遠隔調査車両。
実証実験では、四輪駆動車輪型車体の走行機構の性能を検証するため、泥濘地・土砂災害現場を想定した相模川河川敷の凸凹のあるエリアにおいて、走行試験、水中走行試験、遠隔操作性の評価(オペレータ以外のメンバーでの試運転)を行った。
 
※車輪の回転に合わせてクランクレッグが上下し、凸凹や泥濘(ぬかるみのある)路面を確実に捉えて走行でき、高い踏破性と平地での高速移動が可能。
|
放射線観測ロボット(CERES) 明治大学 |
環境放射線の移動観測が可能な無人ロボット走行体システム。
CERESは、携帯回線を利用した通信機を備え、自らインターネットに接続してステレオ画像、GPS座標、方位角等の情報を送信するため、地上のあらゆる場所からの遠隔運転が可能となることを目指している。また高度な自律機能も備え、通信の不安定な地域での運用を行うことも想定している。活動に要するすべてのエネルギは、装備した大型のソーラーセルから自己給電されるため、外から補給する必要がない。日照の得られる昼間は走行し、夜間は省電力モードになり休眠する。この様なシステムにより、長期間に亘り外部からのサポートなしで運用することができる。
実証実験では、 CERESの機能を確認し、遠隔でのオペレーションにより、観測活動が可能であることを実証する。
 
具体的には、遠隔オペレーションによるフィールドでの走行、様々な地形、地表の構成(舗装面、土壌面、草地等)、斜面を走行させ、踏破性能の評価。3次元地形の評価とそれに基づく自律走行、観測データの自動アップロードとマッピング。通信途絶時の自律対応、観測データに基づく適応的プランニングを行った。また、海老名市の相模川沿いの公道で遠隔オペレーションによる走行試験も実施した。
|
被災者探索レーダーロボット (株)タウ技研 |
アースドリルレーダーは、地震災害時に倒壊建物に閉じ込められた生存者を発見するためのもので、レーダーをアースドリル状の先端部に内蔵し、瓦礫深くねじ込むことによってレーダー部を生存者に近づけ、発見の確率を高めることが可能となる。
 
実証実験では、レーダー部の性能を確認するため、先端内部に装着予定のレーダー単体を災害場所に想定した瓦礫に閉じ込められた生存者の微小な動き及び、距離探知を行った。
|