かわさきロボット競技大会
バトルロボット部門
バトルロボット部門-よくある質問
- Q69<2013.11.15>-20周年イベント関連-
-
①使用するボールの具体的な大きさを教えてください。②スタート姿勢に制限はありますか?③ロボット同士が絡み合ってお互い動作不能となった場合、それ以降の操作を制限しないと危険ではないですか?④セット終了後、動作不能になった機体の処理は、第三者が行うと危険な場合もあるので審判ではなく操縦者がやるべきではないでしょうか?⑤ロボットがコートの場外に出た場合、何らかの形で復帰は可能ですか?⑥「コートの左右にはボールが反射できるように壁を設ける」とありますが、具体的な高さを教えてください。⑦コートに障害物が設置される場合、事前の公開をお願いします。⑧第1回~第20回大会仕様が出場可能となると20回大会仕様のロボットが若干不利になりませんか?
- A69
①1辺約50mmの正五角形を中心に25mmの孔を設けます。 - ②かわさきロボット競技大会と同様となります。
- ③審判の判断により、危険とみなされた場合は試合を一時停止します。審判の指示に従って下さい。
- ④審判の指示が出てから、各自で機体処理を行ってもらいます。
- ⑤コート外に出た場合は、試合中は復帰不可能です。スローイン時に復帰可能です。
- ⑥現段階では、300mmと考えています。
- ⑦設置する場合は、事前に公開します。
- ⑧今回の集団戦は、かわさきロボット競技大会の20周年を記念し、かわロボに関わった参加者との交流を目的に「向き・不向き」「有利・不利」等を気にせず、楽しめるイベントに参加したい方たちを募集しています。
- Q68<2013.08.11>
- 別途指示に基づく充電スペースとあり参加者マニュアルに8階のロボットサロンと明示してあります。参加者の半分くらいはリチウムフェライトバッテリを使うと自分では予測するところですが(少なくとも自分の周りではリチウムフェライトバッテリ以外を使う人は1人しか知りません。)おおよそ充電器何台分のスペースと電力を確保しているのでしょうか?
- A68
当日状況により、充電スペースを増やします。
- Q67<2013.07.30>
- モーターの数、ギア比の変更などは、書類の再提出が必要ですか?
- A67
構造に変更がない場合、モータ数・ギア比の変更については再提出は変更ありません。
- Q66<2013.06.10>
- 従来の機体(主にロングロッドタイプ)で、攻撃時に自機を支えたり、転倒復帰に使用する可動機構(俗に言う可動カウンター)がありました。
今回のルールでは、この可動カウンターをアームとなる揺動リンク機構で攻撃する際に使用した場合、アーム以外の攻撃として反則を取られるのでしょうか?
使用とは、攻撃時に自機の転倒防止(バランス維持)のため、アームとは逆の方向に動かす動作です。 - A66
カウンターアーム機構が大会規則第3章第8条を満たしているリンク機構により動作していた場合、特に禁止項目には該当しません。
逆に、上記項目を満たしていない転倒復帰機構及びその他の機構による攻撃は、大会規則第4章により禁止されていますので許可できません。
試合中一連の動作により「故意ではなく偶然禁止部位が当たってしまった」ケースについては禁止行為違反としない場合がありますが、故意か偶然かの判断は審判の判断によるものとします。
- Q65<2013.05.20>
- 去年の大会では使用可能という判断だったタミヤ製の「380スポーツチューンモーター」は、今年度は使用可能なのでしょうか?(去年度は参加者マニュアルにて明記されていたが、今年の規定では触れられていないように見受けられる)。
- A65
昨年同様、変更ありません。
- Q64<2013.05.20>
- HPにリチウム系電池についての掲載がありますが、大会指定のバッテリはタミヤ製のみと理解してよろしいでしょうか。また、その他のバッテリ(ニカド又はニッケル水素)については制限なしでしょうか。
- A64
応募概要参照。ニカド・ニッケル水素に関しては特に制限はありません。
- Q63<2013.04.29>
- Q37、Q39、Q57の回答から
・回転→リンク機構→回転という変換は認められる
・完全な円軌道を描くアームの使用は認められる
・二つの回転の位相差を利用したスライダー機構は揺動性のあるリンクと認められる
と解釈できると考えます。
しかしQ61でQ57のリンク機構と同じ構造で動力を伝達しているアームのシールド部をアームとして利用することは認められないと回答されています。シールド部分は動力が直接伝わっておらず、揺動性のあるリンクを介して『回転→リンク→回転』という動力伝達になっているのですが、なぜシールド部分をアームとして使用することができないのでしょうか - A63
A61を修正しましたのでご確認ください。
- Q62<2013.04.29>
- 遠心力を利用した揺動は認められますか?
- A62
揺動リンク機構が用いられている事が必要です。
- Q61<2013.04.26> 4月29日修正
- 添付ファイル(Q61)参照
- A61
質問1)リンク部品(2)をアームとする場合、お問い合わせの構造は使用可です。質問2)リンク部品(3)をアームとして攻撃に使用する事はできません。
回転運動部より揺動リンク機構を介して動力が伝達されていれば、問い合わせ図のリンク部品(2)、(3)共にアーム機構として利用可能です。
- Q60<2013.04.26>
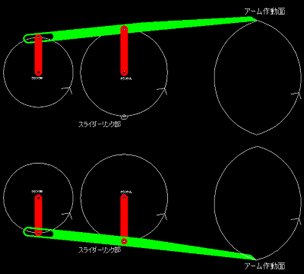
- 「よくある質問」Q56で「バネが動力となりますので、大会規則第3章第8条2に基づく構造で検討して下さい。」とありますが、これは『動力であるバネより先に大会規則第3章8条2に示すように搖動リンク機構を用いればアームとして認められる』という認識でよろしいでしょうか?
その場合、下記画像はピストンクランク機構は搖動リンクとは認められないのでしょうか?
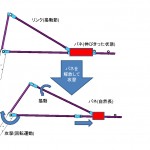
- A60
図示構造によるアームの揺動運動は、スライダーリンク機構の一例として認められます。
なお、巻きばね動力による単純な回転動作、引っ張りばね等による伸縮による前後動作の先端をアーム作動面にする事はできませんので注意して下さい。
- Q59<2013.04.22>
- 「回転機構に複数の動力を有する構造は認められません。」とあるのですが、競技規則 「第3章 ロボットの規格 第8条」からはこれを解釈することが困難です。
「複数の動力を有する構造」が認められない理由を教えていただけないでしょうか?
また、Q41<2013.04.11>の機構にクランクBに直接モータからの動力を伝えずクランクAからリンク機構を介して動力をクランクBに伝えればOKということで宜しいでしょうか? - A59
- 【A41】参照
大会規則第3章第8条第2項を満たさない為、「複数の動力を有する構造」は認められません。
- Q58<2013.04.19>
- 添付ファイル(Q58)参照
- A58
- 送付された画像の範囲に限り、問い合わせの解釈で問題ありません
(緑、水色双方のリンク部品が描く奇跡はアーム機構に利用可能です。)
- Q57<2013.04.19>
- よくある質問コーナーで、リンク機構から再度回転運動に変化してアーム作動面を回転軌跡とする事が認められるとの回答がありました。
左図のように、減速機構内部の減速用のギアを大ギアと小ギアに分割し、お互いをスライダーリンク機構で連結する構造にし回転運動→リンク機構→回転運動と変換する構造は認められますでしょうか。
この構造を減速機構に内蔵して、アームは完全な円軌道を描く作動面を持つ物を考えています。
変換に使用しているスライダーリンク機構は、大ギアと小ギアの位相差を利用して右図のようにギアが1回転する間に通常のスライダーリンク機構のクランク部分が1周したときと同じ動きで運動します。この機構は「回転部分の連結部に揺動性がある」といえるのでしょうか。
もし他の方式も含めて回転とリンクを変換する構造が認められる場合、アーム機構自体は昨年度までとまったく同じ構造も採用できることになります。今年の規則改定はアーム機構全体(モーターから作動面)の中に「揺動性のあるリンクが含まれていればよい」という解釈になるのでしょうか。
- A57
- 「よくある質問A10」を参照。問い合わせの構造自体は問題ありませんが、減速機の内部に組み込まれた場合(=以降に減速、増速等のギアトレインがある場合)、一連の「動力部」と審査時に判断し再確認する場合があります。

- Q56<2013.04.19>
- 腕機構の規定に関して、ピストン・クランク機構を用い、ピストン側にバネで動力を持たせ、クランク側から回転動力を抽出し、そのまま攻撃に用いることは可能ですか?
なお、バネはモータで引っ張りロックをかけ、ロックを開放することで動力を得ます。
そのため、クランク側は半回転しかしません。(バネを引く際に、逆側に半回転してもとに戻ります。) - A56
- バネが動力となりますので、大会規則第3章第8条2に基づく構造で検討して下さい。
- Q55<2013.04.19>
- 第8条の”ロボットには、アーム機構を備えるものとする。本規則におけるアーム機構とは、機構のみを用いて任意の物体を移動させることができ、動作に揺動リンク機構を有しているものとする。”についてです。
かわロボ道場の第三弾ロボット設計講座 第3回 4ページで、揺動リンク機構とは一定の角度で往復動作する運動と定義されております。さらに次の5ページ目では、”軌跡が連続した回転をせずに往復動作をしていれば、揺動機構である”と補足されております。
道場の定義を踏まえての確認ですが、動力となるモータからギアトレインによって接続されたロッド上のアームが円弧状の奇跡を一回転することなく往復動作をするアーム(従来のロッドアーム)は揺動リンク機構を有していると考えていて宜しいでしょうか?
よくある質問のA6が回答だと理解しておりますが、問題ございませんでしょうか? - A55
- 「かわロボ道場」の該当ページは揺動運動の事を解説しているページで、リンク機構の説明は該当ページでは行われておりませんのでご確認ください。また、「よくある質問A25」及び大会規則により、従来の方式(ギアトレイン直結)で動作範囲を有限にしている方式では大会規則第3章第8条2に該当しない為、リンク機構と認められません。
- Q54<2013.04.19>
- 第9条に”ロボットには、転倒防止又は転倒状態からの復帰機構〔防止/復帰共に以下「復帰機構」という〕を備える事が出来る。”と有りますが、転倒防止とは自身の攻撃時も含まれるという解釈で宜しいでしょうか?
- A54
- 攻撃時に姿勢を維持する機構も含みます。
- Q41<2013.04.11>
- 腕機構について下記図のようにクランク半径の違うクランクA(赤)とクランクB(赤)がありその2つの動力からスライダーリンク(緑)を回しスライダーリンクの先端がアームの作動面となります。 かわロボ道場のpg.11のスライダー方式のクランクのスライダの支点がクランクによって動く機構であり揺動リンク機構であると考えられます。 この機構は腕機構としてOKでしょうか?
- A41
- A10及びA30を参照願います。回転機構に複数の動力を有する構造は認められません。どちらか一方の回転構造にはリンク機構を介して動力が伝達される必要があります。
- Q40<2013.04.11>
- よくある質問のA13の図で右の円が駆動軸、左の円が追従するだけの無動力である場合A30が適応されるので連結部(=中間リンク)のピンクの棒は揺動していると解釈してよろしいでしょうか? そして追従している円から動力を取り出した場合左円以降の機構は回転しようが可動範囲有限のロッドにしようが問題ないと解釈してよろしいでしょうか?
- A40
- A13の図についてはA10参照。ピンクの棒は揺動していないと判断します。以降の質問についてはA39を参照願います。
- Q39<2013.04.08>
- 動力軸→平行リンク→無動力軸→真円回転軌跡アーム作動面のようにリンク機構を介して動力から動作が伝達されている場合は「回転軌跡」による攻撃は可能でしょうか?
- A39
- 並行リンクの定義について「よくある質問」のA30が適用された上であれば 回転軌跡による攻撃は可となります。 但し、回転部品の連結部(=中間リンク)に揺動性が必要となります。
- Q38<2013.04.04>
- 1.かわロボはどうやったら勝てますか?
- 2.勝つコツはありますか?
- 3.シード等、楽な方法はありますか?
- 4.どこから作り始めたらいいですか?
- A38
- 1.他団体と交流・情報交換や練習試合等で技術を磨くのはどうでしょうか?
- 2.同上。
- 3.ありません。地道にがんばりましょう。
- 4.かわロボ道場や他参加者を参考にしてください。
- Q37<2013.04.01>
- 「アーム機構の動力を発生する部分から、アーム作動面までの間に必ず揺動リンク機構が組み込まれていること」とありますが、モータの回転運動を揺動運動に変換し、その後更に回転運動に変換し、それをアームの作動面とする事は認められますでしょうか。
- A37
- 大会規定第3章及び第4章に違反していない事を前提とし、認められます。
- Q36
- アームに「回転軌跡利用不可」とありますが、クランクやギアなどの回転運動している物体が相手に接触してしまった場合(故意ではない)、反則を取られるのでしょうか。
- A36
- 内部駆動部品が偶然接触した場合は特に違反としません。故意か否かについては審判の判断によるものとします。
- Q35
- 一つのアームに二つの動力(例・18回大会出場 105番 毒林檎 のロッド部分と横回転部分)が含まれるとき、そのうち一方に揺動リンクが含まれていれば可能なのか
- A35
- 【A34】参照
- Q34
- 一つの動力が二つの出力(例・19回大会出場 116番 EDGE の横回転の刃とアームユニットの回転の連動)を持つとき、片方の動作に揺動リンクが組まれていれば使用することは可能なのか
- A34
- 動力とアーム機構の数の関係については定義していない為、アーム機構として機能する部位はすべてリンク機構を介して動力から動作が伝達されている必要があります
- Q33
- 揺動リンクの詳細な定義を提示してほしい。
- A33
- 参照ファイル(A33)
- Q32
- アームの揺動リンク部分がアームで任意の物体を移動する際に機能している必要はありますか?
- A32
- 歩行などの手段による移動であれば、必ずしもアーム機構が機能している必要はありません。但し、大会規定に違反する機構が用いられていない場合に限ります。
- Q31
- スライダーリンク・平行リンクは揺動リンクに含まれるのか
- A31
- 【A30】参照
- Q30
- アーム機構の動力を発生する部分からアームの動作面までの間で単に平行リンクなどを用いた伝達を行うことで揺動リンク機構を有すると判断されますか?
- A30
- 平行リンクを形成する片方のアームが回転(動力側)する場合、もう片方のアームが動力を持たず、揺動する方式であれば認められます。 二つの動力を有する回転運動部を棒状の部品で連結したものについては、大会規則の定義にある揺動リンク機構と認められません。
- Q29
- 無限回転でない(物理的・あるいは電気的に制限されているもの)ものを攻撃用アームに使用するのは可能なのか
- A29
- 【A28】参照
- Q28
- 空気圧アクチュータを用いる場合でも揺動リンクを有する必要がありますか?
- A28
- 今回は「動力」として定義している為、いかなる動力を用いた場合でも第8条の規則が適用されます。
- Q27
- 第6条6項にある制御システムに使用するバッテリーの種類は制限されるか。
- A27
- ロボット内に使用する電源については、大会規定に基づく物のみ使用可とします
- Q26
- 第10条の禁止事項は26条により反則になるが、罰則の規定がない。どのように扱うのか。
- A26
- 書類審査中は差し戻しとなり、当日の車検以降は失格が適用されます。
- Q25
- 駆動リンクが1回転出来ない4節リンクにおいて、駆動リンクをアーム作動面とすることは出来るか。
- A25
- 大会規定第3章第8条2項に該当しない(動力発生部位から作動面までの間にリンク機構が組み込まれていない)と判断され、認められません。
- Q24
- アーム、脚、復帰機構以外の機構について、交流会の説明では危険でなければどのような機構でも規定内とも取れると思うが、正しいか。また、攻撃能力を持っていてもいいか
- A24
- 攻撃を目的とした機構はアームとみなします。大会規定第3章及び第4章に違反する場合は認められません。
- Q23
- アーム機構,脚機構以外の部分に使用するモーターに制限はありますか?
- A23
- 【A22】参照
- Q22
- アーム、脚、復帰機構以外の機構について、モータの規定がないが自由回転する380モータ以外のモータは使えるか。
- A22
- 書類審査時に機構の内容について審査し、第4章に違反しないものと判断された場合は認められます。
- Q21
- 復帰機構とアーム機構の判断。
- A21
- 試合中、審判から質問がある場合がある。その際に回答してください。
- Q20
- 対応充電器はタミヤ製のみ使用ですか?
- A20
- リチウムフェライトの充電器に対応している事。
- Q19
- バッテリーのコネクタを取り替えた場合は、改造となり反則になりますか?
- A19
- 市販品のコネクタの修理・交換は認めます。
- Q18
- 足を駆動させることにより、その周りにあるクローラーを回転させて前進、後進する機構にしたいのです。しかしこの機構にしてしまうと、クローラーが足の周りを覆っているため地面と足が接地しません。この足機構は大会規定に反していないのでしょうか?
- A18
- 実行委員会審議の結果、大会規定に反すると判断されました。(第3章第7条1項に反する/接地面が往復運動していない、と判断されました)
- Q17
- アーム作動面が20センチメートルの高さを通過するために揺動リンク機構を用いなくてもよいのか。つまり,アーム機構以外の機構によってこの規定を達成することはできるか。
- A17
- 「試合中いつでも任意に通過できる構造」を有している事が必要です。実現方法の一例として、機体の変形機構を利用した姿勢の変化等も認められます。
- Q16
- 「アームの作動面」とは相手を持ち上げる先端部分ですか。それともアームに力を伝える部分ですか。
- A16
- 動力部よりリンク機構を経た後から、相手ロボットに接触する先端部分迄のアーム機構として機能する部位を指すと考えてください。
- Q15
- 緑の部品を回すことにより赤いアーム部分が楕円を描く
- A15
- 【A14】参照
- Q14
- アームと別にアームの定義を満たさない回転体を搭載してそれによる攻撃を行なっても良いのですか? 今まではアームでない部分による攻撃(体当たりや足による攻撃)も許可されておりましたが、「アームではない何か」で攻撃するという方法を取っても良いという解釈でしょうか? 例えばクランクアームを搭載し、これを「アーム」とします。さらに追加でアームの定義を満たさない高速回転する重量物の「何か」を搭載する。 アームの定義を満たしたアームが搭載されているので、機体レギュレーションには抵触しないように思えますが良いのでしょうか?
- A14
- アームの定義を満たさない何かしらの“機構”を、攻撃用に搭載している場合、大会規則第4章に違反しているものとして書類審査時に審査されます。
- Q13
- 平行リンク機構を用いて回転を伝える
- A13
- 【A10】参照
- Q12
- 緑の部品を回すことにより赤いアーム部分が約130度稼働する
- A12
- 【A10】参照
- Q11
- これは最終的なアーム作動面に影響するものでないといけないのでしょうか。例を挙げると、動力を伝達するギアを平行クランクに置き換えた場合などです。
- A11
- 【A10】参照
- Q10
- 新しく追加されたルールにおいて、平行リンクを用いたクランクアームは許可されるのか。
- A10
- 平行リンクを形成する片方のアームが回転(動力側)する場合、もう片方のアームが動力を持たず、揺動する方式であれば認められます。 二つの動力を有する回転運動部を棒状の部品で連結したものについては、アーム機構の定義にある揺動リンク機構と認められません。
- Q9
- 攻撃用途以外で使用する場合でも搖動機構がなければいけないのでしょうか? 例、変形や転倒復帰の場合。
- A9
- 転倒復帰機構については大会規則第3章第9条が適用されます。変形機構については大会規則に違反しない範囲で特に規定しません。
- Q8
- アーム機構が2本以上独立したものまたは2軸以上でそれぞれ別動力で動いているものの場合は両方に揺動リンクが組み込まれていないといけないのでしょうか。
- A8
- 【A7】参照
- Q7
- アームが2チャンネルで動作する場合(まったく別のアームが2種類あるのではなく、2軸ロボットアームのように2つのアクチュエーターによってアーム作用点が決定する場合)片方のアームが搖動リンク機構を備えていればよいのでしょうか。
- A7
- 大会規則第3章第8条2が適用されますので、動力発生部位からアームの先端部位までの間には必ず揺動リンク機構が組み込まれている様にしてください。 また、複数のアーム機構を搭載している場合、大会規則に基づく定義はすべてのアームに適用されます。
- Q6
- 「揺動リンク機構」とは揺動運動の含まれたリンク機構という解釈でよろしいのでしょうか。一回転未満の回転運動は揺動運動に含まれますか。
- A6
- 「揺動運動の含まれたリンク機構」という定義で結構です。連続性のある回転を行わず、円弧上を往復する動作も揺動運動として認められますが、書類審査時に問い合わせ等にて確認を求める場合があります。
- Q5
- 動力となるモーターからギヤをかましてアームがひとつのリンクで揺動運動する(従来のシールドアーム型、ロッドアーム型)は規則に反した機構となるのでしょうか
- A5
- 【A4】参照
- Q4
- 揺動リンク機構だけでは任意の物体を移動させることができず,揺動リンク機構以外の機構を組み合わすことにより任意の物体を移動させることができる場合,アームとして認められるのか。
- A4
- 今大会からは、アーム機構に大会規則第3章の定義に基づく、揺動リンク機構が含まれている事が必要となります。
- Q3
- 攻撃に使われない復帰用のアームにも今回のルールは適用されるのか。
- A3
- 【A2】参照
- Q2
- 揺動リンク機構を持たない機構はアーム,脚ではないので,アームと脚に対する規則は適用しないという認識でよいか。
- A2
- アーム及び脚、転倒復帰等の各機構に該当しない部位については大会規則第3章、及び第4章に基づき申込時に審査されます。
- Q1
- “本規則におけるアーム機構とは、機構のみを用いて任意の物体を移動させることができ”とあるが、”任意の物体”また、”移動させる”とはどのようなもの,ことをいうのか。
- A1
- “任意の物体”は、大会規則に基づくロボット規定を基に運営側が別途定める物体とし、特定の物を示しません。移動についても特定の定義を設けませんが、基本的には上記物体を置いてある場から除去し、操縦によって元の位置もしくは別の位置に置くことが可能な行為を想定しています。